Controlador PID. Você sabe o que é e como funciona? Aula 01 - Teoria Drive Automação e Tecnologia 9:53 5 years ago 98 378 Далее Скачать
Introdução ao controle de processos - Tema 14: Controle Realimentado PI e PID Sistemas de Controle UFSC Julio Elias Normey-Rico 1:31:26 6 years ago 694 Далее Скачать
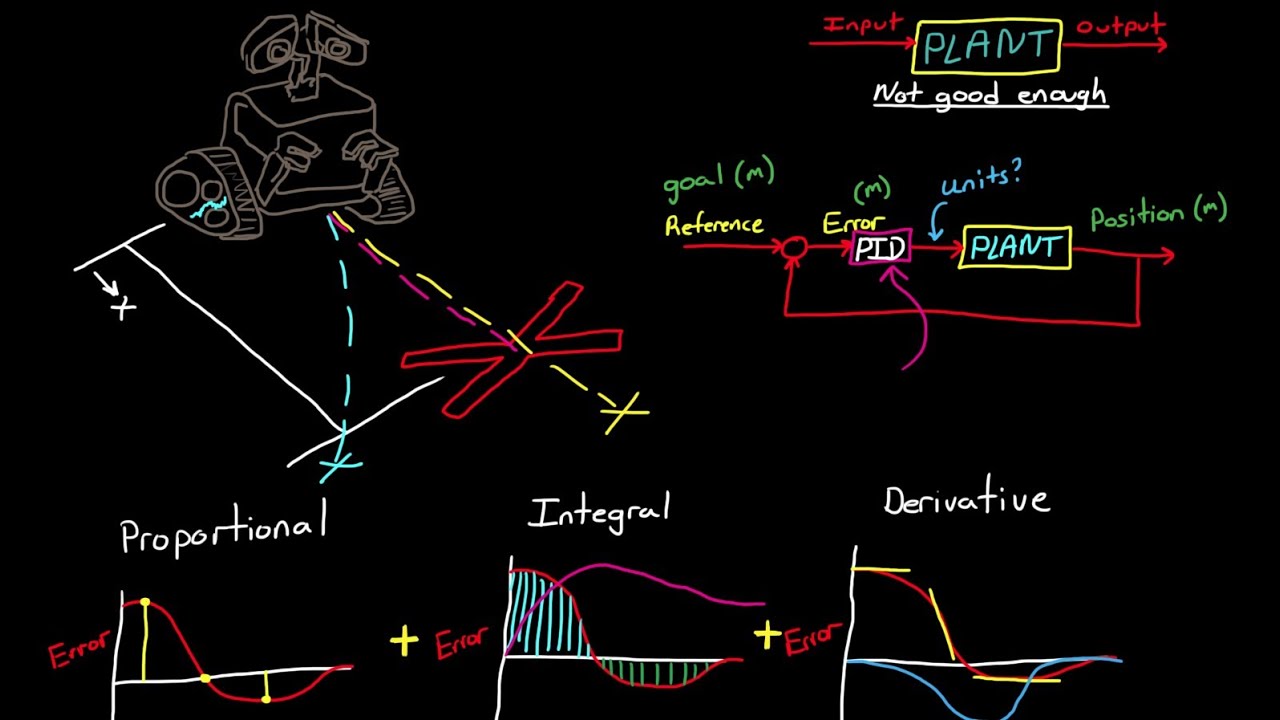
O que é um Controlador PID? (Proporcional, Integral e Derivativo) Idelica 3:28 1 year ago 6 999 Далее Скачать
HVAC Controls-PID Controller-Introduction with Details and Comparison with P, PI & PID #bms Engineering & Automation 7:30 4 years ago 12 679 Далее Скачать
Me Salva! CPID01 - Controle Proporcional - Sistemas de Controle Me Salva! ENEM 11:03 8 years ago 72 923 Далее Скачать
Introdução ao controle de processos - Tema 11: Controle PI. Conceitos Sistemas de Controle UFSC Julio Elias Normey-Rico 1:34:36 6 years ago 1 286 Далее Скачать
Atuação de controladores Feedback P, PI e PID em sistema FOPDT Rafael Veloso Patricio 30:29 4 years ago 782 Далее Скачать